Overview
Overview#
In the future, robots will be pretrained with a diverse set of skills in factory before deployment. However, we believe it is also a must for them to learn with their human users throughout their lifetime to really become a personalized embodied agent. This pertains to the paradigm of lifelong learning in decision making (LLDM). While LLDM is an important research question, currently the community lacks good testbeds for studying LLDM. To this end, we propose LIBERO.
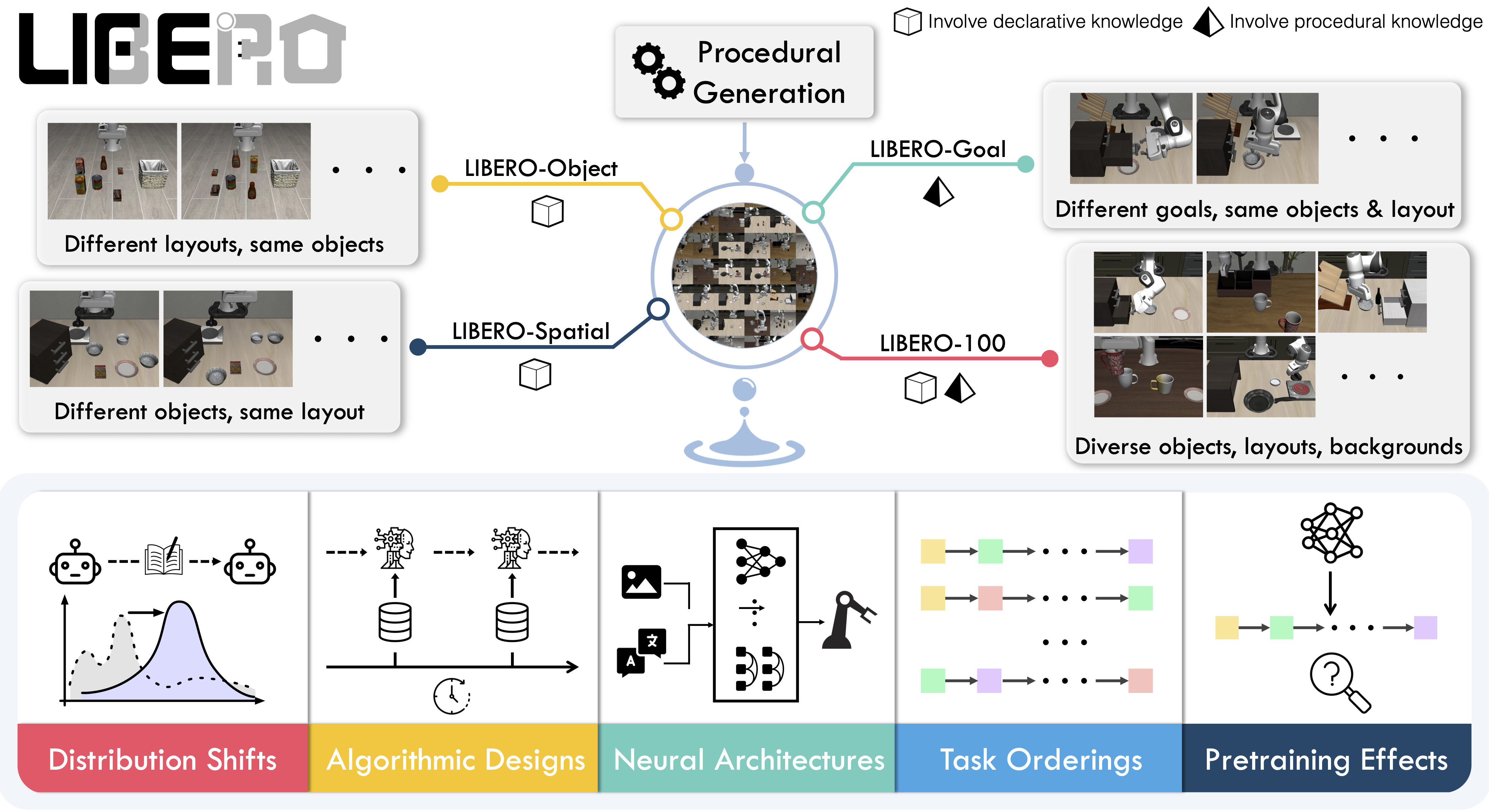
LIBERO consists of 4 task suites and 130 tasks for studying LLDM. Specifically, the tasks in 3 of the 4 task suites vary only in one type of knowledge, while the last task suite requires transfer of entangled knowledge. Please check the details in the Datasets section.